Lichtblick Suite Connection with Robot
This section describes how to install Lichtblick Suite on your PC and how to connect it to a running ROS system using the rosbridge_websocket interface.
Overview
The Lichtblick Suite is a browser-based visualization and interaction tool for robots running ROS 2.
This can be used as an alternative to RViz for visualizing sensor data, robot state, and other information.
It communicates through a WebSocket connection provided by the rosbridge_server package.
By the end of this guide, you will have:
Installed the Lichtblick Suite desktop application
Started a
rosbridge_websocketserverConnected Lichtblick to your ROS system
Installation
Download the Lichtblick Suite
Lichtblick Suite can be found in the following GitHub repository:
You can either download the latest release from the releases page or clone the repository directly.
The general documentation for Lichtblick Suite can be found here: https://lichtblick-suite.github.io/docs/
As a base refernece one can use the following Layout for Lichtblick Suite or the one which is located inside the repository.
{ "configById": { "3D!18i6zy7": { "layers": { "845139cb-26bc-40b3-8161-8ab60af4baf5": { "visible": false, "frameLocked": true, "label": "Grid", "instanceId": "845139cb-26bc-40b3-8161-8ab60af4baf5", "layerId": "foxglove.Grid", "size": 10, "divisions": 10, "lineWidth": 1, "color": "#248eff", "position": [ 0, 0, 0 ], "rotation": [ 0, 0, 0 ], "order": 1 } }, "cameraState": { "perspective": false, "distance": 16.290124999733596, "phi": 153.60698076762236, "thetaOffset": 44.999999999983004, "targetOffset": [ -1.2056978760013366, -2.7431538341442785, 9.464330166873533e-7 ], "target": [ 0, 0, 0 ], "targetOrientation": [ 0, 0, 0, 1 ], "fovy": 45, "near": 0.5, "far": 5000 }, "followMode": "follow-position", "followTf": "odom", "scene": { "transforms": { "showLabel": false, "axisScale": 5 }, "syncCamera": false }, "transforms": { "frame:map": { "visible": false }, "frame:": { "visible": false }, "frame:steer_wheel_link": { "visible": false }, "frame:drive_wheel_link": { "visible": false }, "frame:template_frame": { "visible": false }, "frame:station_frame": { "visible": false }, "frame:drive_wheel_base": { "visible": false }, "frame:drive_wheel_left_link": { "visible": false }, "frame:drive_wheel_right_link": { "visible": false }, "frame:front_safety_scanner": { "visible": false }, "frame:lift": { "visible": false }, "frame:rotator": { "visible": false }, "frame:rear_safety_scanner": { "visible": false }, "frame:odom": { "visible": false }, "frame:base_link": { "visible": true }, "frame:wemo0110/camera_back": { "visible": false }, "frame:wemo0110/camera_back_optical": { "visible": false }, "frame:wemo0110/camera_back_gz": { "visible": false }, "frame:wemo0110/camera_front": { "visible": false }, "frame:wemo0110/camera_front_optical": { "visible": false }, "frame:wemo0110/camera_front_gz": { "visible": false }, "frame:wemo0110/camera_left": { "visible": false }, "frame:wemo0110/camera_left_optical": { "visible": false }, "frame:wemo0110/camera_left_gz": { "visible": false }, "frame:wemo0110/camera_right": { "visible": false }, "frame:wemo0110/camera_right_optical": { "visible": false }, "frame:wemo0110/camera_right_gz": { "visible": false }, "frame:wemo0110/sick_back": { "visible": false }, "frame:wemo0110/sick_front": { "visible": false }, "frame:wemo0110/wheel_back_left": { "visible": false }, "frame:wemo0110/wheel_back_right": { "visible": false }, "frame:wemo0110/wheel_front_left": { "visible": false }, "frame:wemo0110/wheel_front_right": { "visible": false }, "frame:base_footprint": { "visible": false }, "frame:bump_front_center": { "visible": false }, "frame:bump_front_left": { "visible": false }, "frame:bump_front_right": { "visible": false }, "frame:bump_left": { "visible": false }, "frame:bump_right": { "visible": false }, "frame:bumper": { "visible": false }, "frame:button_1": { "visible": false }, "frame:button_2": { "visible": false }, "frame:button_power": { "visible": false }, "frame:cliff_front_left": { "visible": false }, "frame:cliff_front_right": { "visible": false }, "frame:cliff_side_left": { "visible": false }, "frame:cliff_side_right": { "visible": false }, "frame:front_caster_link": { "visible": false }, "frame:front_left_bottom_weight_block": { "visible": false }, "frame:front_left_top_weight_block": { "visible": false }, "frame:front_left_tower_standoff": { "visible": false }, "frame:shell_link": { "visible": false }, "frame:front_right_bottom_weight_block": { "visible": false }, "frame:front_right_top_weight_block": { "visible": false }, "frame:front_right_tower_standoff": { "visible": false }, "frame:imu_link": { "visible": false }, "frame:ir_intensity_front_center_left": { "visible": false }, "frame:ir_intensity_front_center_right": { "visible": false }, "frame:ir_intensity_front_left": { "visible": false }, "frame:ir_intensity_front_right": { "visible": false }, "frame:ir_intensity_left": { "visible": false }, "frame:ir_intensity_right": { "visible": false }, "frame:ir_intensity_side_left": { "visible": false }, "frame:ir_omni": { "visible": false }, "frame:mouse": { "visible": false }, "frame:oakd_camera_bracket": { "visible": false }, "frame:oakd_imu_frame": { "visible": false }, "frame:oakd_link": { "visible": false }, "frame:oakd_left_camera_frame": { "visible": false }, "frame:oakd_left_camera_optical_frame": { "visible": false }, "frame:oakd_rgb_camera_frame": { "visible": false }, "frame:oakd_rgb_camera_optical_frame": { "visible": false }, "frame:oakd_right_camera_frame": { "visible": false }, "frame:oakd_right_camera_optical_frame": { "visible": false }, "frame:rear_left_tower_standoff": { "visible": false }, "frame:rear_right_tower_standoff": { "visible": false }, "frame:rplidar_link": { "visible": false }, "frame:tower_sensor_plate": { "visible": false }, "frame:left_wheel": { "visible": false }, "frame:wheel_drop_left": { "visible": false }, "frame:right_wheel": { "visible": false }, "frame:wheel_drop_right": { "visible": false }, "frame:wemo0110/base_link": { "visible": true }, "frame:left_safety_scanner": { "visible": false }, "frame:right_safety_scanner": { "visible": false }, "frame:top_scanner": { "visible": false }, "frame:camera_link": { "visible": false }, "frame:front_wheel_base": { "visible": false }, "frame:load_wheel_base": { "visible": false }, "frame:fork": { "visible": false }, "frame:intrinsic_tof": { "visible": false }, "frame:mrdvs_tof": { "visible": false }, "frame:mrdvs_rgb": { "visible": false }, "frame:mrdvs": { "visible": false } }, "topics": { "/scan_unified": { "visible": true, "colorField": "intensity", "colorMode": "flat", "colorMap": "turbo", "flatColor": "#2cff00ff", "pointShape": "circle", "pointSize": 10 }, "/template": { "visible": true, "frameLocked": true }, "/ROI": { "visible": true }, "/laser_rear": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 10 }, "/laser_front": { "visible": false, "colorField": "intensity", "colorMode": "flat", "colorMap": "turbo", "pointSize": 10, "flatColor": "#ff0000ff" }, "/laser_front_filtered": { "visible": false, "pointSize": 8, "flatColor": "#08d43aff", "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/local_costmap/costmap": { "visible": false, "colorMode": "costmap", "alpha": 0.40000000000000013 }, "/local_costmap/obstacle_layer_sick_laser_scans": { "visible": false }, "/map": { "visible": true, "colorMode": "custom", "alpha": 0.6000000000000001, "frameLocked": false }, "/global_costmap/virtual_obstacle_layer": { "colorMode": "costmap", "visible": false }, "/gt_template": { "visible": true }, "/docking/EbandLocalPlanner/lc/band": { "visible": false }, "/docking/EbandLocalPlanner/diff/band": { "visible": false }, "/footprint": { "visible": true }, "/move_base/local_plan": { "visible": true, "type": "arrow", "arrowScale": [ 0.3, 0.15, 0.15 ] }, "/move_base/global_plan": { "visible": true }, "/docking/EbandLocalPlanner/diff/local_plan": { "visible": false }, "/EbandLocalPlanner/diff/band": { "visible": false }, "/plan": { "visible": true, "gradient": [ "#ff00008a", "#ff00008a" ], "lineWidth": 0.2 }, "/replanning/plan": { "visible": true, "gradient": [ "#00ff05ff", "#04f500ff" ], "type": "axis", "axisScale": 0.2 }, "/global_costmap/costmap": { "visible": false }, "/collision_visualization": { "visible": false }, "/robot_description": { "visible": false }, "/obstacle_collision_filter/obstacle_zone": { "visible": true }, "/EbandLocalPlanner/diff/local_plan": { "visible": false, "type": "arrow", "gradient": [ "#00ff1eff", "#00f863ff" ] }, "/zone_manager_node/visualization": { "visible": false, "namespaces": { "ERASER_info_text": { "visible": false }, "RESTRICTED_info_text": { "visible": false } }, "showOutlines": true }, "/docking/EbandLocalPlanner/BidirectionalDiffController/band": { "visible": false }, "/docking/EbandLocalPlanner/lr/band": { "visible": false }, "/docking/EbandLocalPlanner/omni/band": { "visible": false }, "/docking/slowdown": { "visible": false }, "/EbandLocalPlanner/bidirdiff/band": { "visible": false }, "/EbandLocalPlanner/diff/forces": { "visible": false }, "/EbandLocalPlanner/lc/band": { "visible": false }, "/EbandLocalPlanner/lc/forces": { "visible": false }, "/EbandLocalPlanner/omni/band": { "visible": false }, "/EbandLocalPlanner/omni/forces": { "visible": false }, "/local_plan_checker": { "visible": false }, "/lts_ng/debug/gb/coarse/grid": { "visible": false }, "/lts_ng/debug/gb/fine/grid": { "visible": false }, "/lts_ng/debug/ini_pose_map_match/grid": { "visible": false }, "/lts_ng/debug/recovery_map_match/grid": { "visible": false }, "/lts_ng/ndt_markers_long_term": { "visible": false }, "/lts_ng/ndt_markers_static": { "visible": false }, "/lts_ng/particle_markers": { "visible": false }, "/lts_ng/pose_graph": { "visible": false }, "/lts_ng/pose_graph_prev": { "visible": false }, "/lts_ng/pose_graph_verbose": { "visible": false }, "/lts_ng/scan_compensation/correlation_grid_markers": { "visible": false }, "/lts_ng/scan_compensation/debug/scan_odom_compensated/pose_debug": { "visible": false }, "/lts_ng/scan_compensation/debug/scan_odom/grid": { "visible": false }, "/neighbour_visualizer/band": { "visible": false }, "/offline_node/pose_graph": { "visible": false }, "/offline_visualization_node/band": { "visible": false }, "/scene": { "visible": false }, "/slowdown": { "visible": true }, "/laser_rear_filtered": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/docking/local_costmap/costmap": { "visible": false }, "/downsampled_costmap": { "visible": false }, "/global_costmap/obstacle_layer_sick_laser_scans": { "visible": false }, "/global_costmap/static_layer": { "visible": false }, "/local_costmap/static_layer": { "visible": false }, "/local_costmap/virtual_obstacle_layer": { "visible": false }, "/lts_ng/hmm_long_term": { "visible": false }, "/lts_ng/hmm_static": { "visible": false }, "/lts_ng/live_graph_map": { "visible": false }, "/lts_ng/map": { "visible": true }, "/lts_ng/ndt_long_term": { "visible": false }, "/lts_ng/ndt_static": { "visible": false }, "/lts_ng/no_mapping_filter": { "visible": false }, "/lts_ng/scan_compensation/correlation_grid": { "visible": false }, "/offline_node/live_graph_map": { "visible": false }, "/replanning/global_costmap/costmap": { "visible": false }, "/replanning/global_costmap/static_layer": { "visible": false }, "/replanning/map": { "visible": false }, "/simulation_map": { "visible": false }, "/global_costmap/voxel_marked_cloud": { "visible": false }, "/local_costmap/voxel_marked_cloud": { "visible": false }, "/mobile_base/sensors/bumper_pointcloud": { "visible": false }, "/pointcloud_unified/map_frame": { "visible": false, "colorField": "z", "colorMode": "colormap", "colorMap": "turbo" }, "/docking/local_costmap/published_footprint": { "visible": false }, "/global_costmap/published_footprint": { "visible": false }, "/local_costmap/published_footprint": { "visible": false }, "/replanning/global_costmap/published_footprint": { "visible": false }, "/goal_pose": { "visible": true }, "/gt_pose": { "visible": false }, "/initialpose": { "visible": false }, "/lts_ng/debug/gb/coarse/pose": { "visible": false }, "/lts_ng/debug/gb/fine/pose": { "visible": false }, "/lts_ng/debug/ini_pose_map_match/pose": { "visible": false }, "/lts_ng/debug/recovery_map_match/pose": { "visible": false }, "/lts_ng/scan_compensation/debug/scan_odom/pose": { "visible": false }, "/move_base_simple/goal": { "visible": false }, "/move_base/passed_waypoint": { "visible": false }, "/docking/EbandLocalPlanner/lc/local_plan": { "visible": false }, "/docking/EbandLocalPlanner/lr/local_plan": { "visible": false }, "/docking/EbandLocalPlanner/omni/local_plan": { "visible": false }, "/EbandLocalPlanner/lc/local_plan": { "visible": false }, "/EbandLocalPlanner/omni/local_plan": { "visible": false }, "/move_base/combined_plan": { "visible": false }, "/move_base/combined_plan_sparsed": { "visible": false }, "/neighbour_visualizer/local_plan": { "visible": false }, "/plan_smoothed": { "visible": false }, "/lts_ng/particles": { "visible": true }, "/robot/localisation/laser_scan": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 3 }, "/scan_top_filtered": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 5.28 }, "/sick_safetyscanners2/scan": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/scan_front_filtered": { "visible": true, "colorField": "range", "colorMode": "flat", "colorMap": "turbo", "pointSize": 7, "flatColor": "#f60000ff" }, "/laser_left": { "visible": false, "colorField": "intensity", "colorMode": "flat", "colorMap": "turbo", "pointSize": 10, "flatColor": "#ff0000ff" }, "/laser_right": { "visible": false, "colorField": "intensity", "colorMode": "flat", "colorMap": "turbo", "flatColor": "#6422ecff", "pointSize": 10 }, "/scan_top": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/visionary_t_mini/cam_24110014/pointcloud": { "visible": true, "colorField": "x", "colorMode": "colormap", "colorMap": "turbo", "stixelsEnabled": false, "flatColor": "#ff0000ff", "pointShape": "square", "pointSize": 1 }, "/visionary_t_mini/cam_24110014/depth": { "visible": false, "frameLocked": true, "cameraInfoTopic": "/visionary_t_mini/cam_24110014/camera_info", "distance": 1, "planarProjectionFactor": 0, "color": "#ffffff", "brightness": 50, "contrast": 50 }, "/visionary_t_mini/cam_24110014/grayscale": { "visible": true, "frameLocked": true, "cameraInfoTopic": "/visionary_t_mini/cam_24110014/camera_info", "distance": 1, "planarProjectionFactor": 0, "color": "#ffffff", "brightness": 50, "contrast": 50 }, "/visionary_t_mini/cam_24110014/camera_info": { "visible": false }, "/move_base/local_costmap/footprint": { "visible": true, "color": "#edff6bff" }, "/move_base/EbandLocalPlanner/eband_bubbles": { "visible": true }, "/move_base/local_costmap/costmap": { "visible": true, "colorMode": "costmap", "alpha": 0.20000000000000015 }, "/bmwstr_zone_model/zone_manager_node/visualization": { "visible": true }, "/scan": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 10 }, "/scanner/cloud": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/collision_zone/stop": { "visible": true, "colorField": "z", "colorMode": "colormap", "colorMap": "turbo" }, "/amcl_pose": { "visible": false }, "/pid_no_move_area": { "visible": false }, "/col_bot_area": { "visible": false }, "/move_base/EbandLocalPlanner/intermediate_local_plan": { "visible": true }, "/EbandFollowTrajLocalPlanner/omni/local_plan": { "visible": false }, "/EbandFollowTrajLocalPlanner/diff/local_plan": { "visible": false }, "/laser_left_filtered": { "visible": false, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo" }, "/scan_unified_filtered": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 10 }, "/EbandFollowTrajLocalPlanner/diff/forces": { "visible": false }, "/EbandFollowTrajLocalPlanner/diff/band": { "visible": false }, "/lx_camera_node/LxCamera_Cloud": { "visible": true, "colorField": "z", "colorMode": "colormap", "colorMap": "turbo" }, "/scan_unified_unthrottled": { "visible": true, "colorField": "intensity", "colorMode": "flat", "colorMap": "turbo", "pointSize": 10, "flatColor": "#182ed0ff" }, "/wemo0096/scan_unified": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 10 }, "/EbandLocalPlanner/bidir_diff/band": { "visible": true }, "/EbandLocalPlanner/bidir_omni/band": { "visible": true }, "/oakd/rgb/preview/depth": { "visible": true, "frameLocked": true, "cameraInfoTopic": "/oakd/rgb/preview/camera_info", "distance": 1, "planarProjectionFactor": 0, "color": "#ffffff", "brightness": 50, "contrast": 50 }, "/docking/AckermannLocalPlanner/local_plan": { "visible": true, "type": "axis" }, "/docking/optimal_trajectory": { "visible": true }, "/docking/transformed_global_plan": { "visible": true }, "/docking/EbandLocalPlanner/bidir_diff/band": { "visible": true }, "/template_marker": { "visible": false }, "/detection_pose": { "visible": true }, "template_marker_scaled": { "visible": true }, "/EbandFollowTrajLocalPlanner/bidir_diff/local_plan": { "visible": false }, "/docking/EbandLocalPlanner/bidir_lc/band": { "visible": false }, "/scan_unified/filtered": { "visible": false }, "/EbandFollowTrajLocalPlanner/bidir_diff/band": { "visible": false }, "/replanning/planner_server/HybridAStar_AStar/expansion": { "visible": false }, "/wemo0110/scan_unified": { "visible": true, "colorField": "intensity", "colorMode": "colormap", "colorMap": "turbo", "pointSize": 10 }, "/slam_toolbox/scan_visualization": { "visible": false }, "/route_graph": { "visible": false }, "/initial_pose": { "visible": true }, "/EbandFollowTrajLocalPlanner/bidir_omni/band": { "visible": false }, "/docking/EbandLocalPlanner/bidir_omni/band": { "visible": true }, "/planner_server/HybridAStar_AStar/path": { "visible": false }, "/planner_server/HybridAStar/path": { "visible": true }, "/slam_toolbox/graph_visualization": { "visible": true } }, "publish": { "type": "pose", "poseTopic": "/goal_pose", "pointTopic": "/clicked_point", "poseEstimateTopic": "/initialpose", "poseEstimateXDeviation": 0.5, "poseEstimateYDeviation": 0.5, "poseEstimateThetaDeviation": 0.26179939 }, "imageMode": {} } }, "globalVariables": {}, "userNodes": { "33e74a5f-da70-4d3a-bcb1-b24e713e499c": { "sourceCode": "// The ./types module provides helper types for your Input events and messages.\nimport { Input, Message } from \"./types\";\n\n// Use the ROS schema type for visualization_msgs/Marker\ntype MarkerMsg = Message<\"visualization_msgs/Marker\">;\n\n// Our script outputs a Marker message\ntype Output = MarkerMsg;\n\n// Subscribe to the incoming marker topic\nexport const inputs = [\"/template_marker\"];\n\n// Republish the modified marker here (visible only inside Studio)\nexport const output = \"template_marker_scaled\";\n\n// Set scale to a fixed value\nconst SCALE_VALUE = 3.0;\n\n// This function is called with messages from your input topics.\nexport default function script(event: Input<\"/template_marker\">): Output {\n const msg = event.message as MarkerMsg;\n\n return {\n ...msg,\n // force a uniform scale of 2.0 on all axes\n scale: {\n x: SCALE_VALUE,\n y: SCALE_VALUE,\n z: SCALE_VALUE,\n },\n };\n}\n ", "name": "33e74a5f" }, "7ff4ea3c-1ecc-4402-b0e7-4fae03b64fb7": { "sourceCode": "// The ./types module provides helper types for your Input events and messages.\nimport { Input, Message } from \"./types\";\n\n// Use the ROS schema type for visualization_msgs/Marker\ntype MarkerMsg = Message<\"visualization_msgs/Marker\">;\n\n// Our script outputs a Marker message\ntype Output = MarkerMsg;\n\n// Subscribe to the incoming marker topic\nexport const inputs = [\"/template_marker\"];\n\n// Republish the modified marker here (visible only inside Studio)\nexport const output = \"template_marker_scaled\";\n\n// Set scale to a fixed value\nconst SCALE_VALUE = 3.0;\n\n// This function is called with messages from your input topics.\nexport default function script(event: Input<\"/template_marker\">): Output {\n const msg = event.message as MarkerMsg;\n\n return {\n ...msg,\n // force a uniform scale of 2.0 on all axes\n scale: {\n x: SCALE_VALUE,\n y: SCALE_VALUE,\n z: SCALE_VALUE,\n },\n };\n}\n ", "name": "7ff4ea3c" } }, "playbackConfig": { "speed": 5 }, "layout": "3D!18i6zy7" }
Connect to Robot
To connect Lichtblick to your robot’s ROS system, follow these steps:
Connect to the robot via ssh:
ssh ubuntu@<robot_ip_address>Ensure that the
rosbridge_websocketserver is running on your robot. You can start it with the following command:tmux new -d -s rosbridge 'ros2 launch rosbridge_server rosbridge_websocket_launch.xml'Open the Lichtblick Suite application on your PC.
In Lichtblick, navigate to the connection settings and enter the IP address and port of the robot running the
rosbridge_websocketserver (default port is 9090).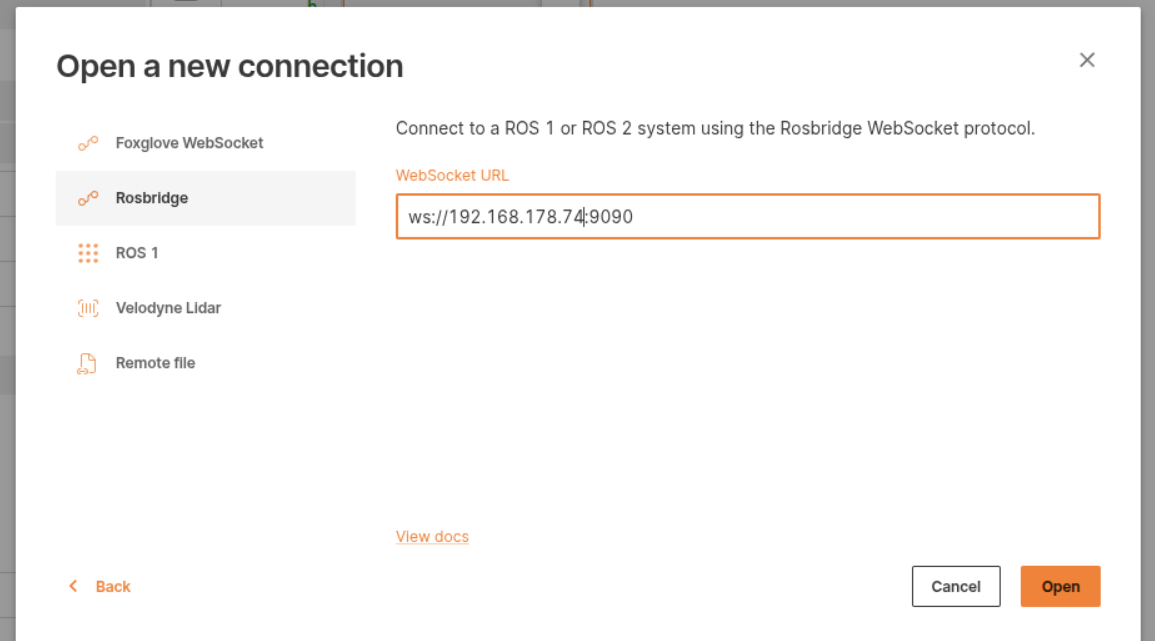
Click “Open” to establish the connection.
Once connected, you should be able to visualize and interact with your robot’s ROS system through the Lichtblick Suite interface.
Interact with Robot
After establishing the connection, you can use Lichtblick Suite to:
Visualize sensor data such as camera feeds, LiDAR scans, and more.
Monitor robot state information including joint states, battery levels, etc.
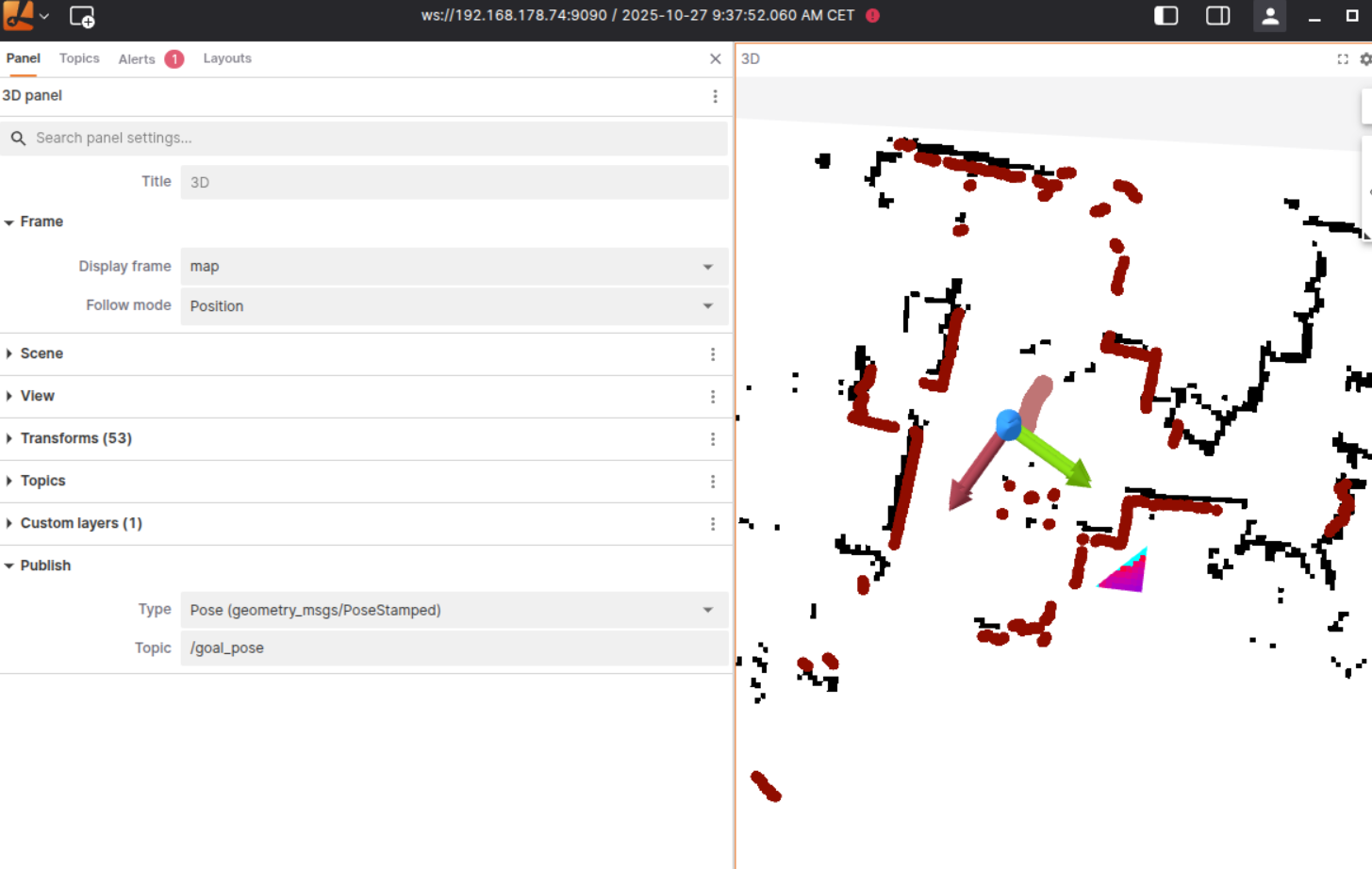
Send commands to the robot similar to RViz like sending intial poses or goals.
To send an initial pose click on the to publish tool on the top right on the 3D panel
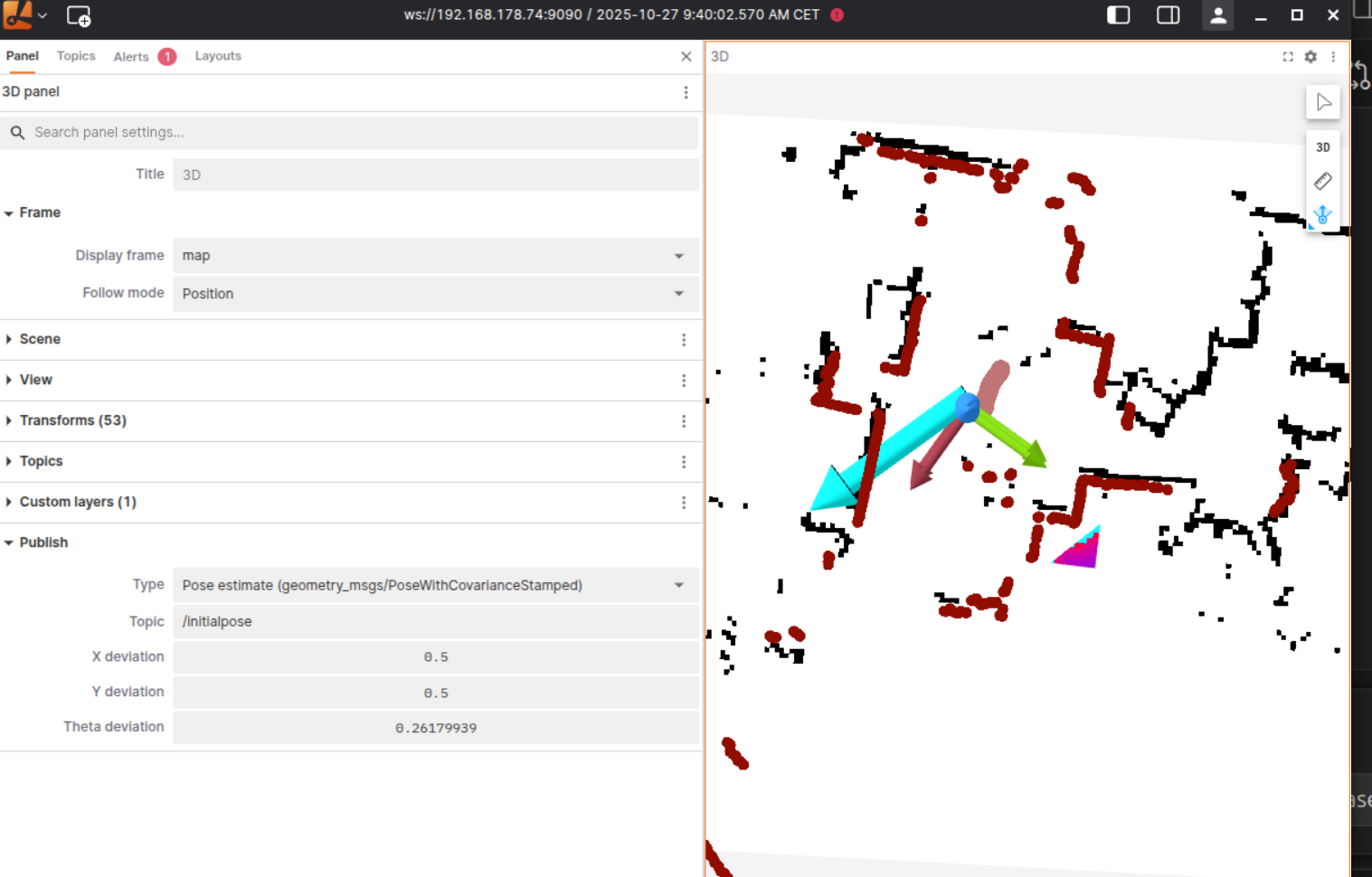
With the publish section on the 3D panel one can switch between different topics to publish to.